Matthew Chang
|
I am currently a Research Scientist at Amazon Frontier AI & Robotics (FAR). I completed my Ph.D. in 2024 at the University of Illinois Urbana-Champaign, advised by Saurabh Gupta. Before that I completed my undergraduate and master's degrees in Electrical Engineering and Computer Science at MIT. The focus of my Ph.D. dissertation was learning from in-the-wild human videos for robotics, with applications in navigation and manipulation. Recently, my work has focused on developing LLM-based systems for robotic planning, and learning representations of the world that facilitate planning and control. |

|
|
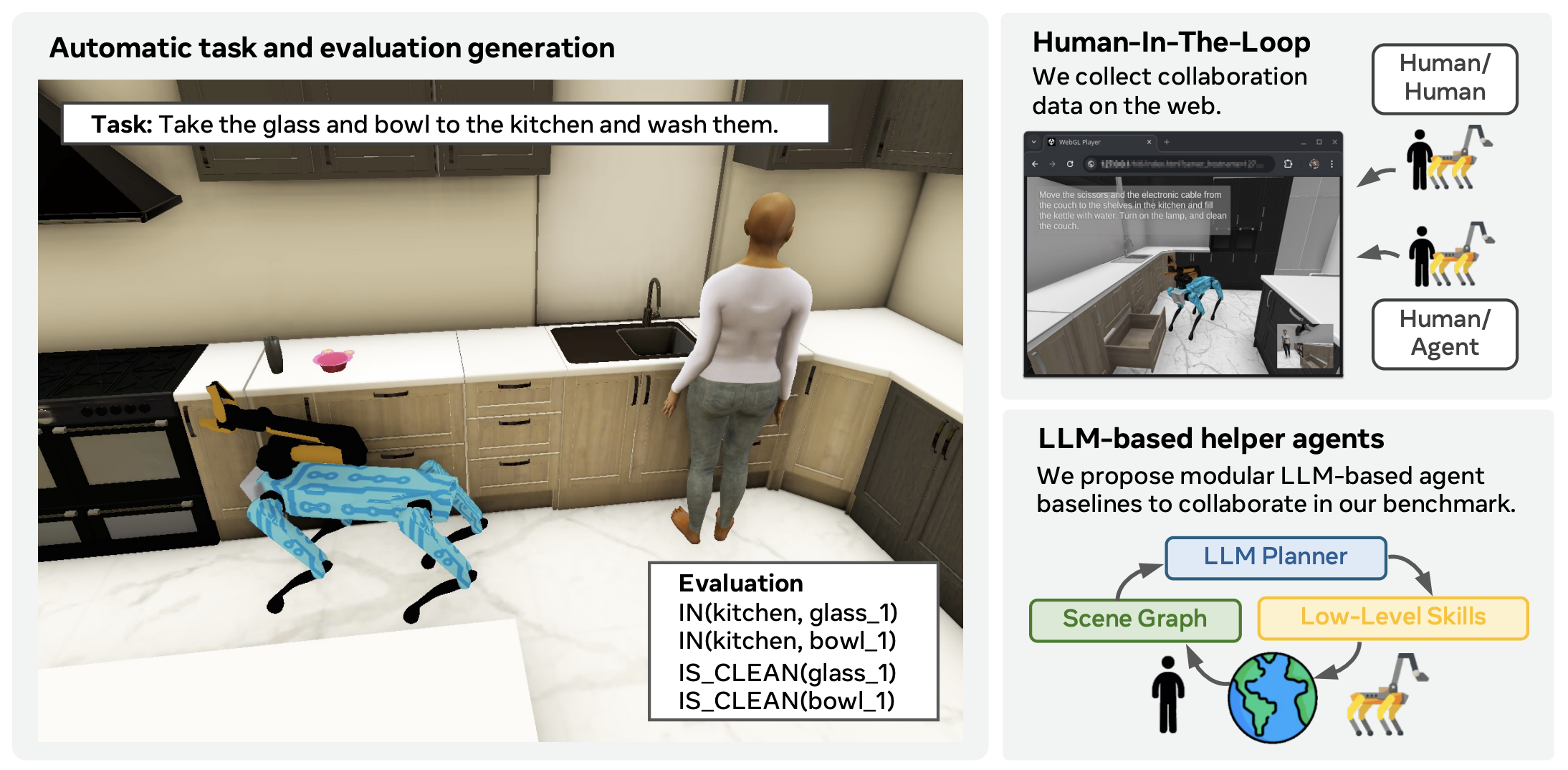
Matthew Chang, Gunjan Chhablani, Alexander William Clegg, Mikael Dallaire Cote, Ruta Desai, Michal Hlavac, Vladimir Karashchuk, Jacob Krantz, Roozbeh Mottaghi, Priyam Parashar, Siddharth Patki, Ishita Prasad, Xavi Puig, Akshara Rai, Ram Ramrakhya, Daniel Tran, Joanne Truong, John Turner, Eric Undersander, Jimmy Yang ICLR 2025 abstract /
bibtex /
webpage /
paper /
code
We present a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration (PARTNR) designed to study human-robot coordination in household activities. PARTNR tasks exhibit characteristics of everyday tasks, such as spatial, temporal, and heterogeneous agent capability constraints. We employ a semi-automated task generation pipeline using Large Language Models (LLMs), incorporating simulation in the loop for grounding and verification. PARTNR stands as the largest benchmark of its kind, comprising 100,000 natural language tasks, spanning 60 houses and 5,819 unique objects. We analyze state-of-the-art LLMs on PARTNR tasks, across the axes of planning, perception and skill execution. The analysis reveals significant limitations in SoTA models, such as poor coordination and failures in task tracking and recovery from errors. When LLMs are paired with real humans, they require 1.5x as many steps as two humans collaborating and 1.1x more steps than a single human, underscoring the potential for improvement in these models. We further show that fine-tuning smaller LLMs with planning data can achieve performance on par with models 9 times larger, while being 8.6x faster at inference. Overall, PARTNR highlights significant challenges facing collaborative embodied agents and aims to drive research in this direction. title={PARTNR: A Benchmark for Planning and Reasoning in Embodied Multi-agent Tasks}, author={Matthew Chang and Gunjan Chhablani and Alexander William Clegg and Mikael Dallaire Cote and Ruta Desai and Michal Hlavac and Vladimir Karashchuk and Jacob Krantz and Roozbeh Mottaghi and Priyam Parashar and Siddharth Patki and Ishita Prasad and Xavi Puig and Akshara Rai and Ram Ramrakhya and Daniel Tran and Joanne Truong and John Turner and Eric Undersander and Jimmy Yang}, booktitle={International Conference on Learning Representations}, year={2025} } |
|
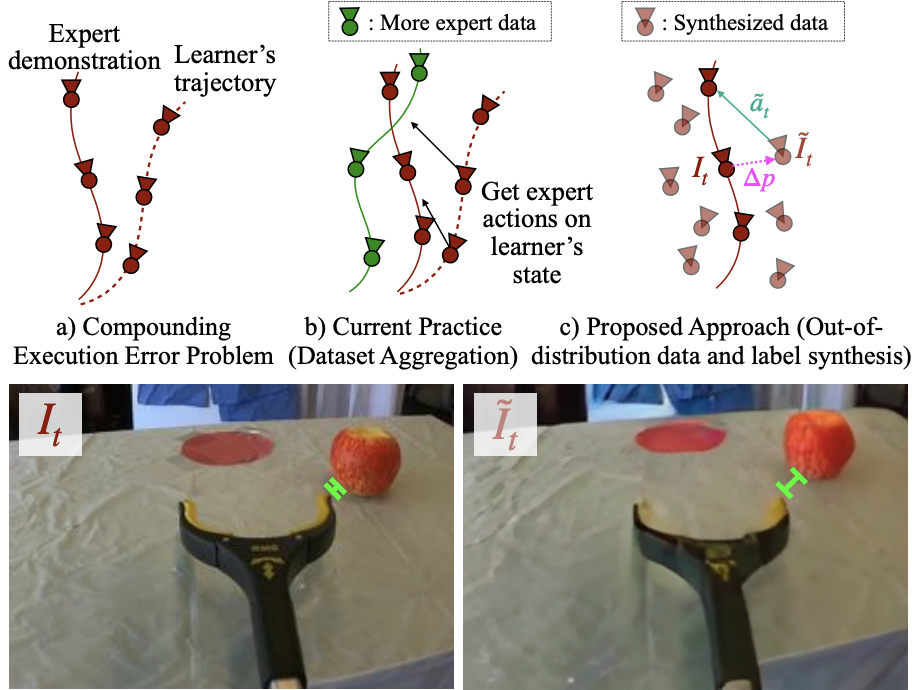
Xiaoyu Zhang, Matthew Chang, Pranav Kumar, Saurabh Gupta RSS 2024 abstract /
bibtex /
webpage /
paper /
code
A common failure mode for policies trained with imitation is compounding execution errors at test time. When the learned policy encounters states that are not present in the expert demonstrations, the policy fails, leading to degenerate behavior. The Dataset Aggregation, or DAgger approach to this problem simply collects more data to cover these failure states. However, in practice, this is often prohibitively expensive. In this work, we propose Diffusion Meets DAgger (DMD), a method to reap the benefits of DAgger without the cost for eye-in-hand imitation learning problems. Instead of collecting new samples to cover out-of-distribution states, DMD uses recent advances in diffusion models to synthesize these samples. This leads to robust performance from few demonstrations. We compare DMD against behavior cloning baseline across four tasks: pushing, stacking, pouring, and shirt hanging. In pushing, DMD achieves 80% success rate with as few as 8 expert demonstrations, where naive behavior cloning reaches only 20%. In stacking, DMD succeeds on average 92% of the time across 5 cups, versus 40% for BC. When pouring coffee beans, DMD transfers to another cup successfully 80% of the time. Finally, DMD attains 90% success rate for hanging shirt on a clothing rack. title={Diffusion Meets DAgger: Supercharging Eye-in-hand Imitation Learning}, author={Xiaoyu Zhang and Matthew Chang and Pranav Kumar and Saurabh Gupta}, booktitle={Robotics: Science and Systems}, year={2024} } |

|
Matthew Chang*, Theophile Gervet*, Mukul Khanna*, Sriram Yenamandra*, Dhruv Shah, Tiffany Min, Kavit Shah, Chris Paxton, Saurabh Gupta, Dhruv Batra, Roozbeh Mottaghi, Jitendra Malik*, Devendra Singh Chaplot* RSS 2024 abstract /
bibtex /
webpage /
paper /
video
In deployment scenarios such as homes and warehouses, mobile robots are expected to autonomously navigate for extended periods, seamlessly executing tasks articulated in terms that are intuitively understandable by human operators. We present GO To Any Thing (GOAT), a universal navigation system capable of tackling these requirements with three key features: a) Multimodal: it can tackle goals specified via category labels, target images, and language descriptions, b) Lifelong: it benefits from its past experience in the same environment, and c) Platform Agnostic: it can be quickly deployed on robots with different embodiments. GOAT is made possible through a modular system design and a continually augmented instance-aware semantic memory that keeps track of the appearance of objects from different viewpoints in addition to category-level semantics. This enables GOAT to distinguish between different instances of the same category to enable navigation to targets specified by images and language descriptions. In experimental comparisons spanning over 90 hours in 9 different homes consisting of 675 goals selected across 200+ different object instances, we find GOAT achieves an overall success rate of 83%, surpassing previous methods and ablations by 32% (absolute improvement). GOAT improves with experience in the environment, from a 60% success rate at the first goal to a 90% success after exploration. In addition, we demonstrate that GOAT can readily be applied to downstream tasks such as pick and place and social navigation. title={GOAT: GO to Any Thing}, author={Matthew Chang and Theophile Gervet and Mukul Khanna and Sriram Yenamandra and Dhruv Shah and So Yeon Min and Kavit Shah and Chris Paxton and Saurabh Gupta and Dhruv Batra and Roozbeh Mottaghi and Jitendra Malik and Devendra Singh Chaplot}, booktitle={Robotics: Science and Systems}, year={2024} } |
|
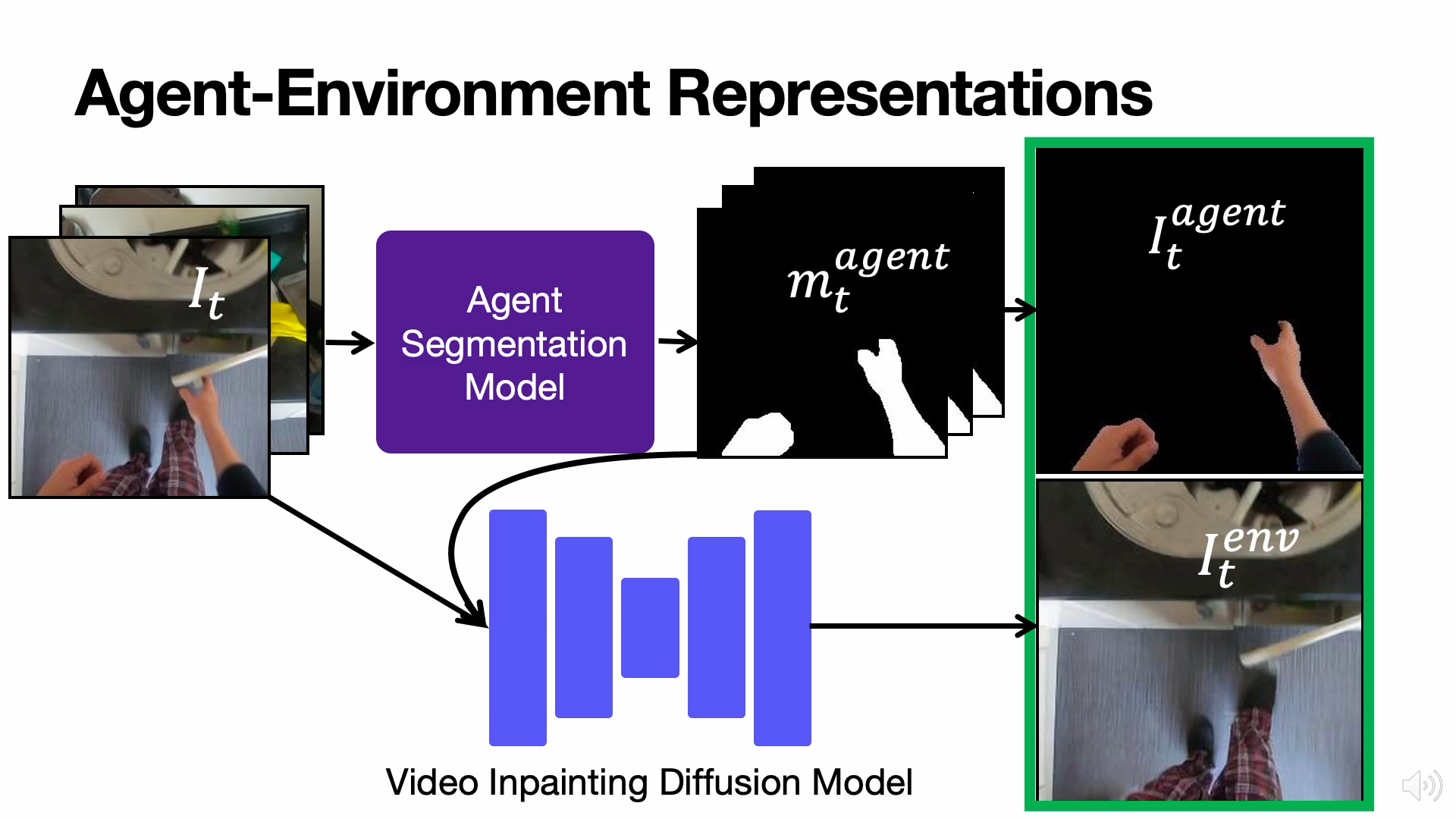
Matthew Chang, Aditya Prakash, Saurabh Gupta NeurIPS 2023 abstract /
bibtex /
webpage /
paper /
video
The analysis and use of egocentric videos for robotic tasks is made challenging by occlusion due to the hand and the visual mismatch between the human hand and a robot end-effector. In this sense, the human hand presents a nuisance. However, often hands also provide a valuable signal, e.g. the hand pose may suggest what kind of object is being held. In this work, we propose to extract a factored representation of the scene that separates the agent (human hand) and the environment. This alleviates both occlusion and mismatch while preserving the signal, thereby easing the design of models for downstream robotics tasks. At the heart of this factorization is our proposed Video Inpainting via Diffusion Model (VIDM) that leverages both a prior on real-world images (through a large-scale pre-trained diffusion model) and the appearance of the object in earlier frames of the video (through attention). Our experiments demonstrate the effectiveness of VIDM at improving inpainting quality on egocentric videos and the power of our factored representation for numerous tasks: object detection, 3D reconstruction of manipulated objects, and learning of reward functions, policies, and affordances from videos. title={Look Ma, No Hands! Agent-Environment Factorization of Egocentric Videos}, author={Matthew Chang and Aditya Prakash and Saurabh Gupta}, year={2023}, booktitle={NeurIPS}}, } |
|
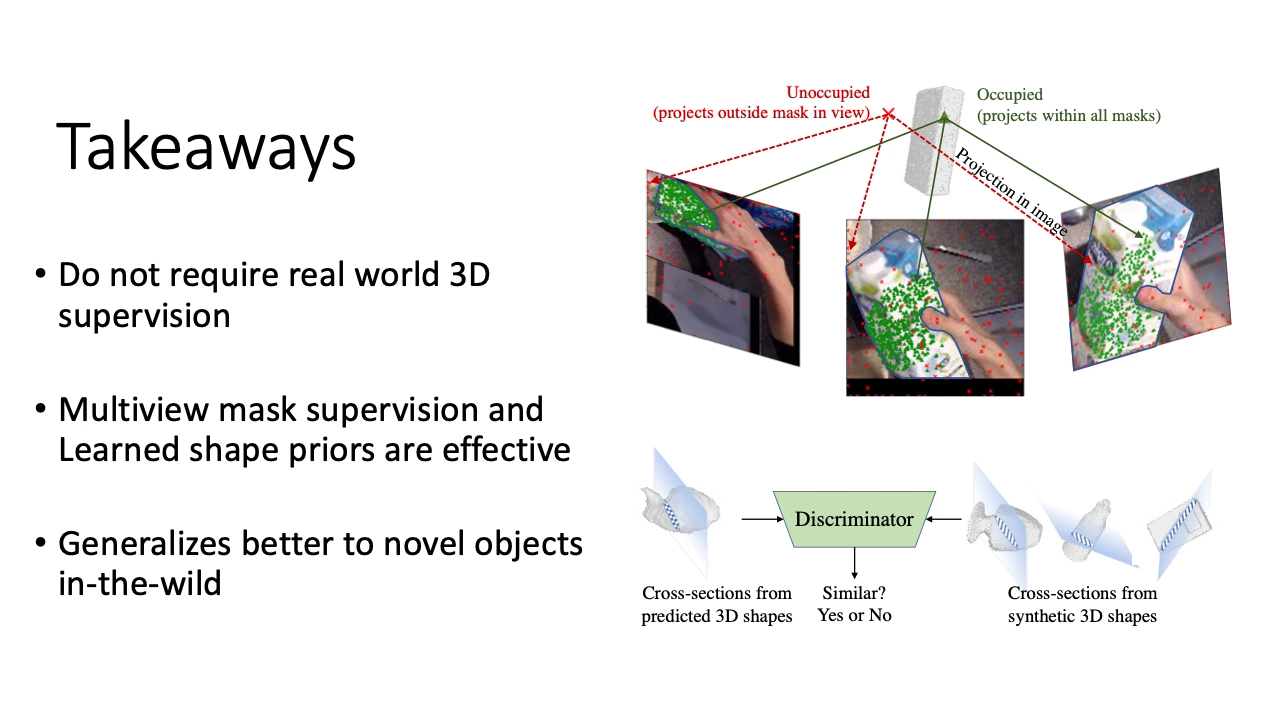
Aditya Prakash, Matthew Chang, Matthew Jin, Saurabh Gupta Pre-Print, 2023 abstract /
bibtex /
webpage /
paper /
video
Prior works for reconstructing hand-held objects from a single image rely on direct 3D shape supervision which is challenging to gather in real world at scale. Consequently, these approaches do not generalize well when presented with novel objects in in-the-wild settings. While 3D supervision is a major bottleneck, there is an abundance of in-the-wild raw video data showing hand-object interactions. In this paper, we automatically extract 3D supervision (via multiview 2D supervision) from such raw video data to scale up the learning of models for hand-held object reconstruction. This requires tackling two key challenges: unknown camera pose and occlusion. For the former, we use hand pose (predicted from existing techniques, e.g. FrankMocap) as a proxy for object pose. For the latter, we learn data-driven 3D shape priors using synthetic objects from the ObMan dataset. We use these indirect 3D cues to train occupancy networks that predict the 3D shape of objects from a single RGB image. Our experiments on the MOW and HO3D datasets show the effectiveness of these supervisory signals at predicting the 3D shape for real-world hand-held objects without any direct real-world 3D supervision. author = {Prakash, Aditya and Chang, Matthew and Jin, Matthew and Gupta, Saurabh}, title = {Learning Hand-Held Object Reconstruction from In-The-Wild Videos}, journal = {arXiv}, volume = {2305.03036}, year = {2023} } |
|
Matthew Chang, Saurabh Gupta ICRA 2023 Deep Reinforcement Learning Workshop NeurIPS 2022 abstract /
bibtex /
webpage /
paper /
video
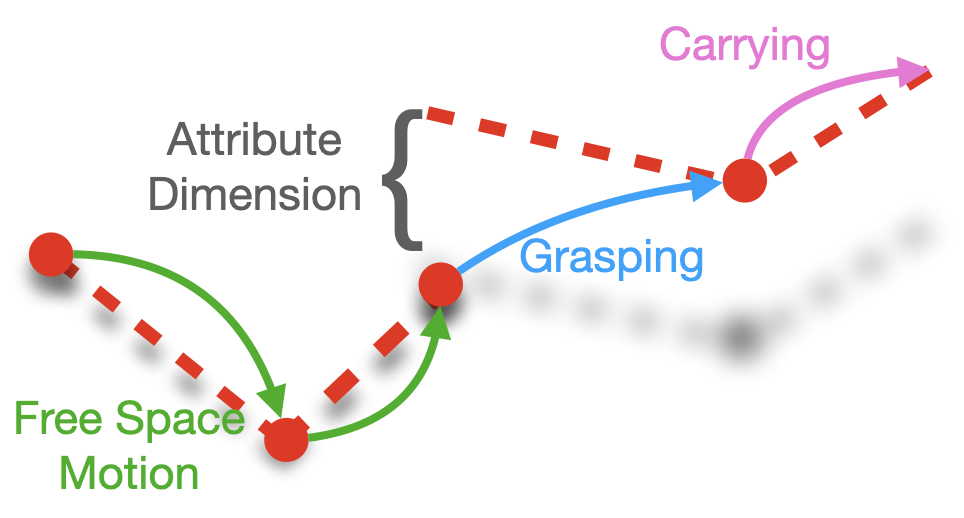
In this paper, we analyze the behavior of existing techniques and design new solutions for the problem of one-shot visual imitation. In this setting, an agent must solve a novel instance of a novel task given just a single visual demonstration. Our analysis reveals that current methods fall short because of three errors: the DAgger problem arising from purely offline training, last centimeter errors in interacting with objects, and mis-fitting to the task context rather than to the actual task. This motivates the design of our modular approach where we a) separate out task inference (what to do) from task execution (how to do it), and b) develop data augmentation and generation techniques to mitigate mis-fitting. The former allows us to leverage hand-crafted motor primitives for task execution which side-steps the DAgger problem and last centimeter errors, while the latter gets the model to focus on the task rather than the task context. Our model gets 100% and 48% success rates on two recent benchmarks, improving upon the current state-of-the-art by absolute 90% and 20% respectively. title={One-shot Visual Imitation via Attributed Waypoints and Demonstration Augmentation}, author={Chang, Matthew and Gupta, Saurabh}, booktitle={International Conference on Robotics and Automation}, year={2023} } |
|
Matthew Chang, Arjun Gupta, Saurabh Gupta International Conference on Learning Representations (ICLR) 2022 Embodied AI Workshop CVPR 2022 Workshop on Offline Reinforcement Learning NeurIPS 2021 Deep Reinforcement Learning Workshop NeurIPS 2021 abstract / bibtex / webpage / paper / video
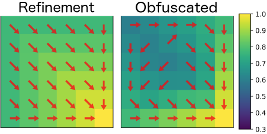
This paper tackles the problem of learning value functions from undirected state-only experience (state transitions without action labels i.e. (s,s',r) tuples). We first theoretically characterize the applicability of Q-learning in this setting. We show that tabular Q-learning in discrete Markov decision processes (MDPs) learns the same value function under any arbitrary refinement of the action space. This theoretical result motivates the design of Latent Action Q-learning or LAQ, an offline RL method that can learn effective value functions from state-only experience. Latent Action Q-learning (LAQ) learns value functions using Q-learning on discrete latent actions obtained through a latent-variable future prediction model. We show that LAQ can recover value functions that have high correlation with value functions learned using ground truth actions. Value functions learned using LAQ lead to sample efficient acquisition of goal-directed behavior, can be used with domain-specific low-level controllers, and facilitate transfer across embodiments. Our experiments in 5 environments ranging from 2D grid world to 3D visual navigation in realistic environments demonstrate the benefits of LAQ over simpler alternatives, imitation learning oracles, and competing methods. author = "Chang, Matthew and Gupta, Arjun and Gupta, Saurabh", title = "Learning Value Functions from Undirected State-only Experience", booktitle = "International Conference on Learning Representations", year = "2022" } |
|
Matthew Chang, Arjun Gupta, Saurabh Gupta Neural Information Processing Systems (NeurIPS) 2020 abstract / bibtex / webpage / paper / video
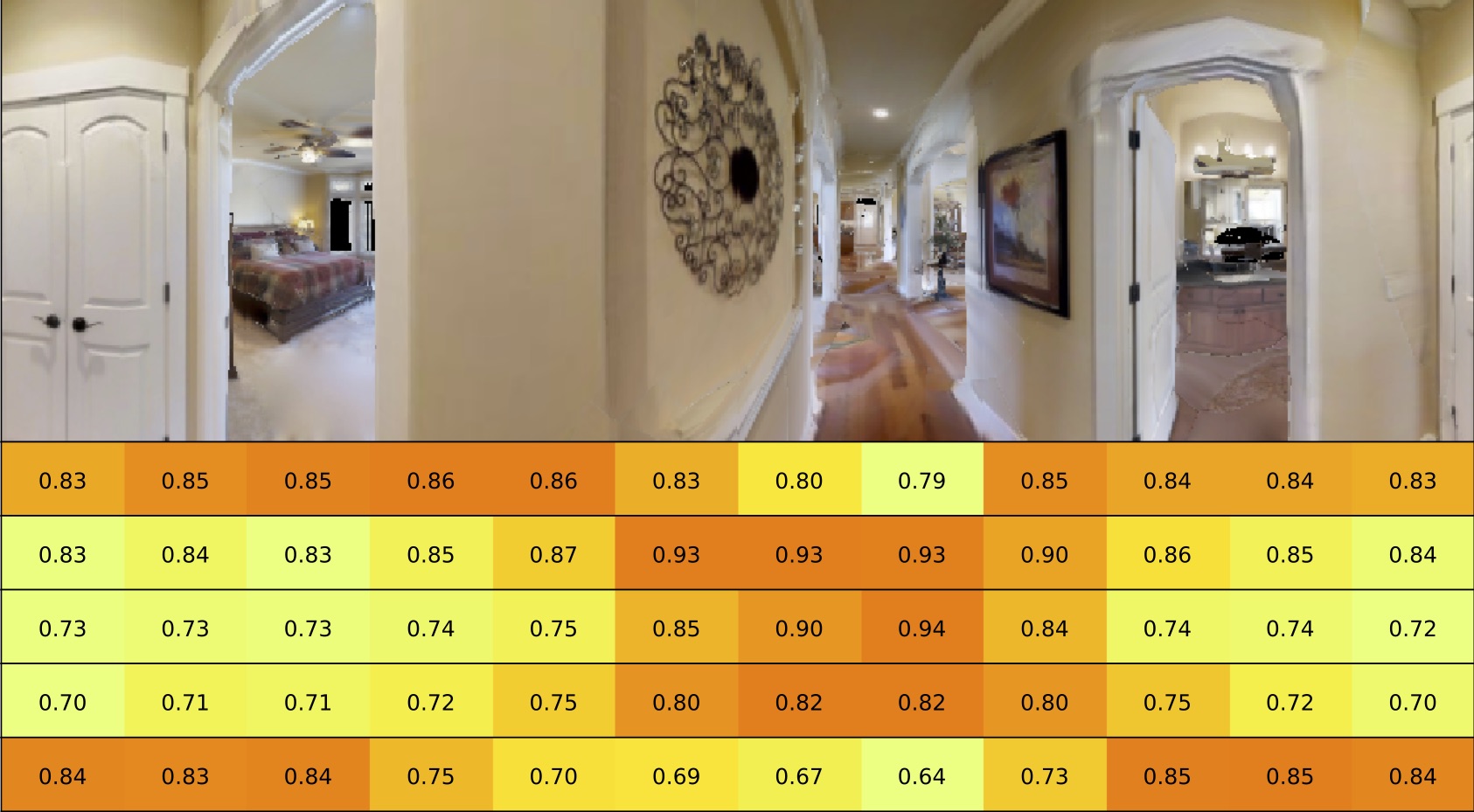
Semantic cues and statistical regularities in real-world environment layouts can improve efficiency for navigation in novel environments. This paper learns and leverages such semantic cues for navigating to objects of interest in novel environments, by simply watching YouTube videos. This is challenging because YouTube videos do not come with labels for actions or goals, and may not even showcase optimal behavior. Our method tackles these challenges through the use of Q-learning on pseudo-labeled transition quadruples (image, action, next image, reward). We show that such off-policy Q-learning from passive data is able to learn meaningful semantic cues for navigation. These cues, when used in a hierarchical navigation policy, lead to improved efficiency at the ObjectGoal task in visually realistic simulations. We observe a relative improvement of 15-83% over end-to-end RL, behavior cloning, and classical methods, while using minimal direct interaction. author = "Chang, Matthew and Gupta, Arjun and Gupta, Saurabh", title = "Semantic Visual Navigation by Watching YouTube Videos", booktitle = "Advances in Neural Information Processing Systems", year = "2020" } |
|
|